
The Robox RID20-E servo drive is the optimal solution for implementing decentralized automation architectures. Designed for installation in close proximity to the motor (NEARBY), the RID20-E addresses space and wiring complexity issues while still ensuring the reliability and performance of a centralized system in critical environments, thanks to its IP67 protection.
Transducers
Product variants
RMD65 – Robox Motor Drive 2.2NM (100DT)
RMD82 – Robox Motor Drive 3.2NM (100DT)
RMD102 – Robox Motor Drive 7.2NM (100DT)
Communication and diagnostics
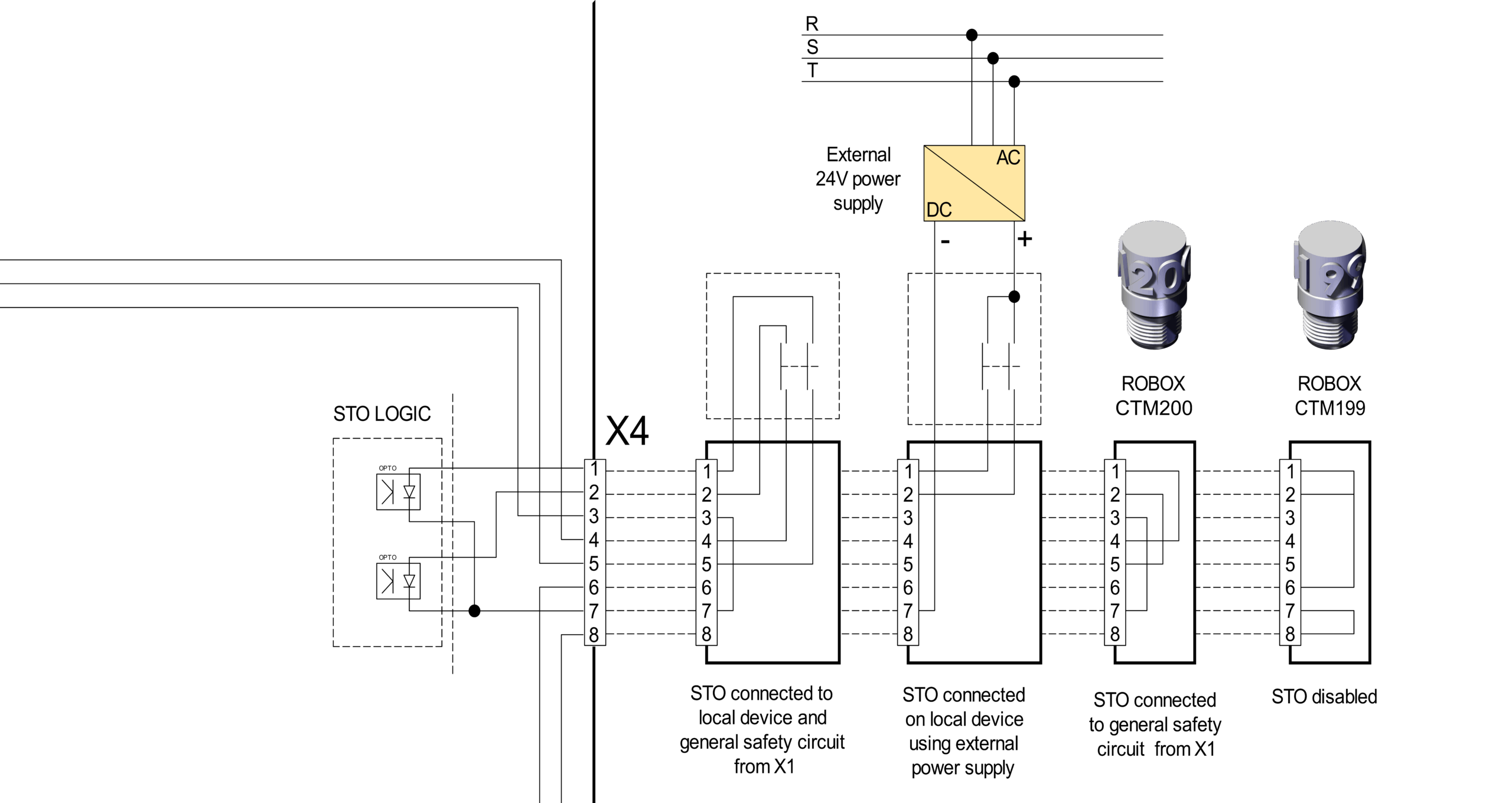
Safety functions
The Safety Torque-Off (STO) function can be selected:
Connectors
Expandability
I/O’s Default configuration
I/O’s configuration 2
I/O’s configuration 3
Mechanical and electrical specifications
Programming and interfacing
Parameterization and interface fof RID20-E are managed via RDE, the Robox environment.
The RID20-E Servo Drive mounted on the RMD is certified


Design and production of electronic equipment, programming languages, development environments for robotics and motion control.
![]()
![]()




 Accessibility Statement
Accessibility Statement