The main features are:
The option to import the lay-out, in DXF file format, of both the plant and the veichle, allowing the user to define path specifying:
- crossroads
- allowed orientations
- allowed direction for travel
- speeds for every segment
- behaviors
- turns
- radius
- speed
- clockwise or anti-clockwise rotations
- starting points
- load/unload points
- etc.
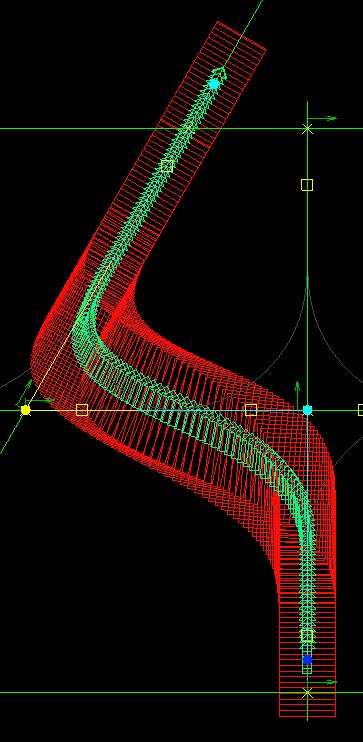
RAT, due to the precision in the paths definition and the dimensions of the AGVs, allows to simulate the timings and encumberances, to optimize the behavior of the AGV itself. The software supports navigation with absolute navigation systems compatible.
Documents

Design and production of electronic equipment, programming languages, development environments for robotics and motion control.
![]()
![]()
 Accessibility Statement
Accessibility Statement